

















亲爱的读者们,你是否对ROS(Robot Operating System)这个强大的机器人操作系统感兴趣呢?想要亲手打造一个机器人,让它为你执行各种任务?别急,今天我就要给你带来一份特别详细的多角度ROS视频教程,让你轻松入门,一步步成为机器人编程高手!
一、ROS简介:开启机器人编程之旅

ROS,全称Robot Operating System,是一个开源的机器人操作系统,它为机器人开发者提供了一个强大的框架,用于构建、测试和部署机器人应用。ROS拥有丰富的库和工具,可以帮助你轻松实现机器人控制、感知、导航等功能。
二、ROS视频教程:全方位教学
1. 入门篇:ROS基础
- 视频教程1:ROS安装与配置
- 介绍ROS的安装环境,包括操作系统、依赖库等。
- 演示ROS的安装过程,包括源码编译和包管理。
- 展示ROS的配置方法,包括环境变量设置和配置文件修改。
- 视频教程2:ROS基本概念
- 介绍ROS中的节点、话题、服务、动作等基本概念。
- 演示如何创建节点、发布话题、订阅话题、调用服务、发送动作等操作。
- 分析ROS的通信机制,包括消息格式、传输方式等。
2. 进阶篇:ROS高级应用
- 视频教程3:ROS机器人控制
- 介绍ROS中的控制器,如PID控制器、运动学控制器等。
- 演示如何使用控制器控制机器人运动,实现直线运动、曲线运动等。
- 分析控制器参数调整方法,优化机器人运动性能。
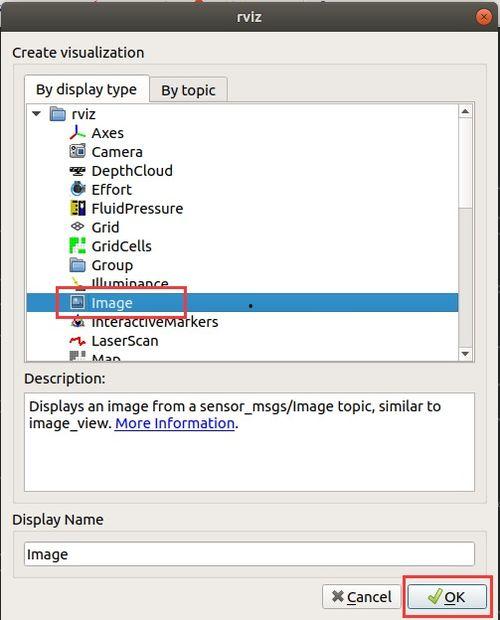
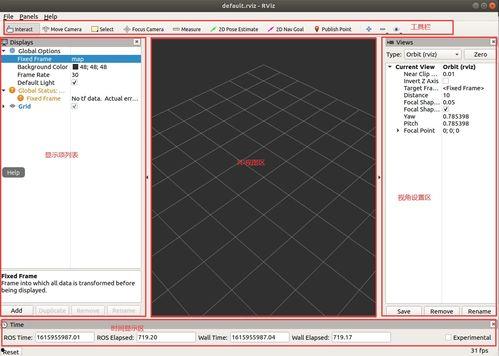
- 视频教程4:ROS机器人感知
- 介绍ROS中的传感器,如激光雷达、摄像头等。
- 演示如何使用传感器获取环境信息,实现障碍物检测、路径规划等。
- 分析传感器数据处理方法,提高机器人感知能力。
3. 实战篇:ROS项目实战
- 视频教程5:ROS机器人导航
- 介绍ROS中的导航系统,如AMCL、DWA等。
- 演示如何使用导航系统实现机器人自主导航。
- 分析导航系统参数调整方法,提高机器人导航精度。
- 视频教程6:ROS机器人避障
- 介绍ROS中的避障算法,如RRT、A等。
- 演示如何使用避障算法实现机器人自主避障。
- 分析避障算法优缺点,提高机器人避障能力。
三、ROS视频教程学习心得
1. 理论与实践相结合
视频教程中既有理论讲解,又有实际操作演示,让你在学习过程中能够更好地理解和掌握ROS。
2. 循序渐进,由浅入深
视频教程从入门到进阶,逐步深入,让你在掌握基础知识的同时,能够逐步提升自己的技能。
3. 实战项目,学以致用
视频教程中的实战项目,让你在实际操作中巩固所学知识,提高自己的编程能力。
通过这份详细的多角度ROS视频教程,相信你已经对ROS有了更深入的了解。赶快行动起来,开启你的机器人编程之旅吧!相信在不久的将来,你将成为一个机器人编程高手,为机器人事业贡献自己的力量!
转载请注明来自日本调教视频,本文标题:《ros视频教程,从入门到精通的实践指南》





 京公网安备11000000000001号
京公网安备11000000000001号 京ICP备11000001号
京ICP备11000001号